

【ROKAE】ヒューマノイド用力制御アームARシリーズ
2026.01.05
ROKAEのヒューマノイド用力制御アームARシリーズをご紹介します。
全7軸に力覚センサを搭載し、人のような柔軟性と繊細さを正確に再現します。
多様なニーズに応え、業務効率と品質向上に貢献します。
ARシリーズを搭載した双腕ロボット
特長
![]() 超軽量化
超軽量化
一体型力制御関節を採用し、本体質量10kg以下で可搬質量5kg
![]() 7自由度設計・生体模倣設計
7自由度設計・生体模倣設計
十字型アーム構造により、人の腕のような精密かつ柔軟な動作を再現
![]() 充実した機能・オープンエコシステム
充実した機能・オープンエコシステム
高い拡張性と応用性で、多様な形態に対応可能
![]() 全関節高精度力感知と高応答力制御技術
全関節高精度力感知と高応答力制御技術
力制御帯域幅>10Hz、力制御精度≤0.15N、≤0.05N.m
![]() 産業化検証済み、高い安全性と信頼性
産業化検証済み、高い安全性と信頼性
世界トップクラスの全軸力制御協働ロボット技術が基盤
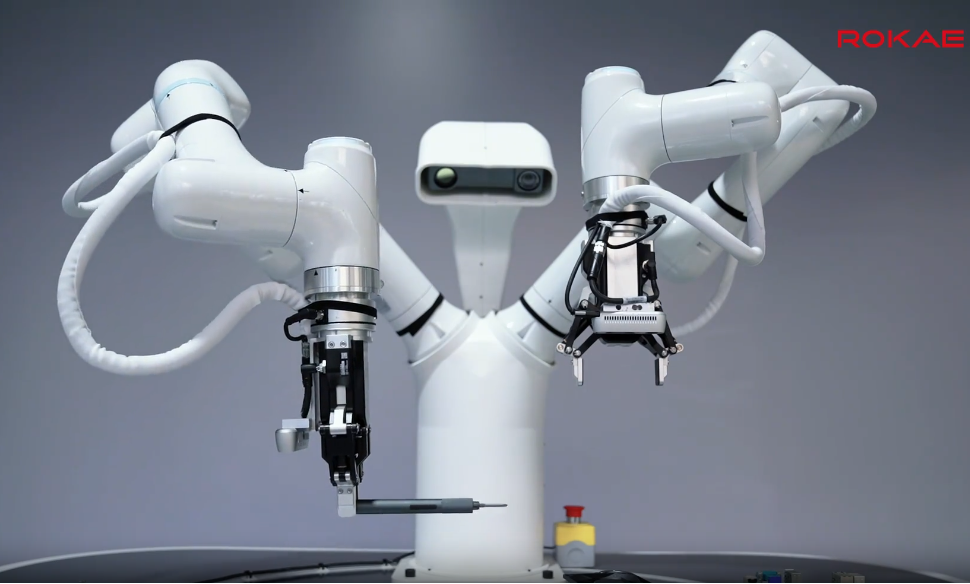
▲CPU組立を行う様子
製品仕様
| AR5 | AR5P | ||
| 基本仕様 | 定格負荷 | 5kg | |
| 本体重量 | ≤10kg | ||
| 自由度 | 7 | ||
| 動作半径 | 683mm | 650mm | |
| 位置繰返し精度 | +0.1mm | ||
| 絶対位置決め精度 | +1mm | ||
| TCP最大速度 | 1.5m/s | ||
| 関節中空径 | ≥9mm | ||
| 保護等級 | IP54 | ||
| ブレーキ | ブレーキ制動 | 関節部ブレーキ機構 | |
| 力制御 | 関節トルクセンサー | 標準 | |
| 先端6軸力センサー | オプション(測定範囲200N/7N·m, 精度≤2% F.S. | ||
| 力制御精度 | ≤0.15N,≤0.05N.m(参考値) | ||
| 力制御分解能力 | ≤0.05N,≤0.02N.m(参考値) | ||
| 力センサー過負荷耐性 | ≥300%F.S. | ||
| 力制御総合精度 | ≤1%F.S. | ||
| サンプリング周波数 | ≥5kHz | ||
| トルククローズドループ | 初期スキームではコントローラーがトルククローズドループ制御、高度スキームでは関節でトルククローズドループ制御 | ||
| インピーダンス制御 | 単腕アドミタンスを単独使用:アドミタンス実行中に、アドミタンス制御パラメーターをリアルタイムで更新 | ||
| 負荷識別 | 負荷自動識別 | ||
| 入力電源 | 電源電圧 | 48V DC(±15%) | |
| エンコーダー | エンコーダー | デュアルエンコーダー | |
| 通信 | 通信方 | EtherCAT | |
| 通信周期 | 1+0.1ms | ||
| 騒音 | 騒音 | ≤60dB | ≤55dB |
| 温度 | 使用温度 | 0°C~50°C | |
| 温度上昇 | 温度上昇30℃以下、本体温度60℃以下 | ||
| 湿度 | 使用湿度 | 10%~90%RH(結露しないこと) | |
| 調整 | 調整ソフトウェア | ソフトウェアは7軸ロボットアームに対応し、可視化デバッグが可能 | |
| 振動 | 耐振動性 | GB/T 4798.5-2007に準拠 厳酷度:5M | |
| 耐衝撃強度 | GBT39266-2020に準拠 衝撃加速度:10g | ||
高機能なSDKアルゴリズムや豊富なエンドエフェクタインターフェースを組み合わせることで、
ヒューマノイドロボットや移動式双腕ロボットなど多様な形態に柔軟に対応できます。
人工知能、データ収集、学習訓練及びスマートファクトリーなどの分野で幅広く応用されています。
お問い合わせは、
営業担当または営業本部エンジニアリンググループまでお願いいたします。